Despite the vacation period, the developers have not remained idle in July. Here is an update on some of the new developments.
Collision shapes
While the internal collision system provides many useful tests between various collision solids, the CollisionTube solid (representing a capsule shape) in particular was only really useful as an “into” collision shape. Many of you have requested for more tests to be added so that it can also be used as a “from” shape, since many see it as a good fit for use with character bodies. Earlier, we had already added tube-into-plane and tube-into-sphere tests. We have now also extended this to include tube-into-tube tests and tube-into-box tests. We have also added a line-into-box test to complete the suite of CollisionBox tests.
For those who are using Bullet physics instead of the internal collision system, we have also extended the ability to convert collision solids from the Panda3D representation to the Bullet representation to include CollisionTube and CollisionPlane as well. These solids can now be easily converted to a BulletCapsuleShape and BulletPlaneShape, respectively. This way you can add these shapes directly to your .egg models and load them into your application without needing custom code to convert them to Bullet shapes.
Depth buffer precision
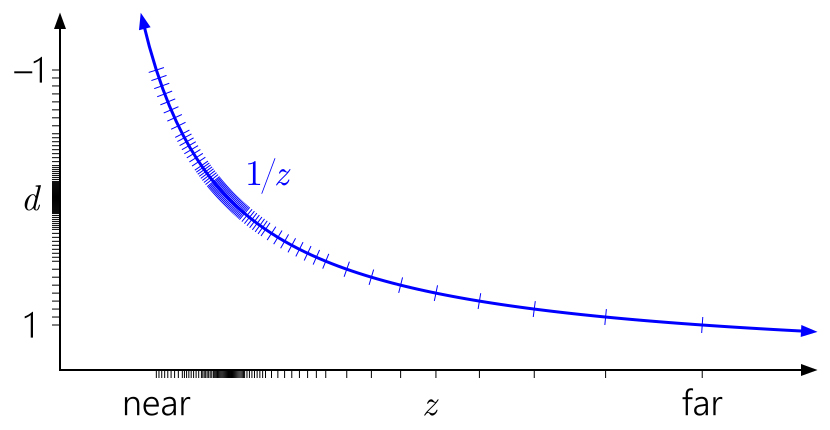
As most Panda3D programmers will know, two important variables to define when configuring a camera in any game are the “near” and “far” distances. These determine the range of the depth buffer; objects at the near distance have a value in the depth buffer of 0.0, whereas objects at the far plane have a value of 1.0. As such, they also determine the drawing range: objects that fall outside this range cannot be rendered. This is fundamental to how perspective rendering works in graphics APIs.
As it happens, because of the way the projection matrix is defined, it is actually possible to set the “far” distance to infinity. Panda3D added support for this a while ago already. Because of the reciprocal relationship between the distance to the camera and the generated depth value, the near distance is far more critical to the depth precision than the far distance. If it is too low, then objects in the distance will start to flicker as the differences in depth values between different objects becomes 0; the video card can no longer tell the difference between their respective distances and gets confused about which surface to render in front of the other. This is usually known as “Z-fighting”. This is a real problem in games that require a very large drawing distance, while still needing to render objects close to the camera. There are a few ways to deal with this.
One way people usually try to resolve this is by increasing the precision of the depth buffer. Instead of the default 24 bits of depth precision, we can request a floating-point depth buffer, which has 32 bits of depth precision. However, since 32-bit floating-point numbers still have a 24-bit mantissa, this does not actually improve the precision by that much. Furthermore, due to the exponential nature of floating-point numbers, most precision is actually concentrated near 0.0, whereas we actually need precision in the distance.
As it turns out, there is a really easy way to solve this: just invert the depth range! By setting the near distance to infinity, and the far distance to our desired near distance, we get an inverted depth range whereby a value of 1.0 is close to the camera and 0.0 is infinitely far away. This turns out to radically improve the precision of the depth buffer, as further explained by this NVIDIA article, since the exponential precision curve of the floating-point numbers now complements the inverse precision curve of the depth buffer. We also need to swap the depth comparison function so that objects that are behind other objects won’t appear in front of them instead.
There is one snag, though. While the technique above works quite well in DirectX and Vulkan, where the depth is defined to range from 0.0 to 1.0, OpenGL actually uses a depth range of -1.0 to 1.0. Since floating-point numbers are most precise near 0.0, this actually puts all our precision uselessly in the middle of the depth range:
This is not very helpful, since we want to improve depth precision in the distance. Fortunately, the OpenGL authors have remedied this in OpenGL 4.5 (and with the GL_ARB_clip_control extension for earlier versions), where it is possible to configure OpenGL to use a depth range of 0.0 to 1.0. This is accomplished by setting the gl-depth-zero-to-one configuration variable to `true`. There are plans to make this the default Panda3D convention in order to improve the precision of projection matrix calculation inside Panda3D as well.
All the functionality needed to accomplish this is now available in the development builds. If you wish to play with this technique, check out this forum thread to see what you need to do.
Double precision vertices in shaders
For those who need the greatest level of numerical precision in their simulations, it has been possible to compile Panda3D with double-precision support. This makes Panda3D perform all transformation calculations with 64-bit precision instead of the default 32-bit precision at a slight performance cost. However, by default, all the vertex information of the models are still uploaded as 32-bit single-precision numbers, since only recent video cards natively support operations on 64-bit precision numbers. By setting the vertices-float64 variable, the vertex information is uploaded to the GPU as double-precision.
This worked well for the fixed-function pipeline, but was not supported when using shaders, or when using an OpenGL 3.2+ core-only profile. This has now been remedied; it is possible to use double-precision vertex inputs in your shaders, and Panda3D will happily support this in the default shaders when vertices-float64 is set.
Interrogate additions
The system we use to provide Python bindings for Panda3D’s C++ codebase now has limited support for exposing C++11 enum classes to Python 2 as well by emulating support for Python 3 enums. This enables Panda3D developers (and any other users of Interrogate) to use C++11 enum classes in order to better wrap enumerations in the Panda3D API.
Multi-threading
We have continued to improve the thread safety of the engine in order to make it easier to use the multi-threaded rendering pipeline. Mutex lock have been added to the X11 window code, which enables certain window calls to be safely made from the App thread. Furthermore, a bug was fixed that caused a crash when taking a screenshot from a thread other than the draw thread.